[1]:
%load_ext autoreload
%autoreload 2
%matplotlib inline
%config InlineBackend.figure_format = 'svg'
import numpy as np
import matplotlib.pyplot as plt
from IPython.display import Image
T-Tail HALE Model tutorial¶
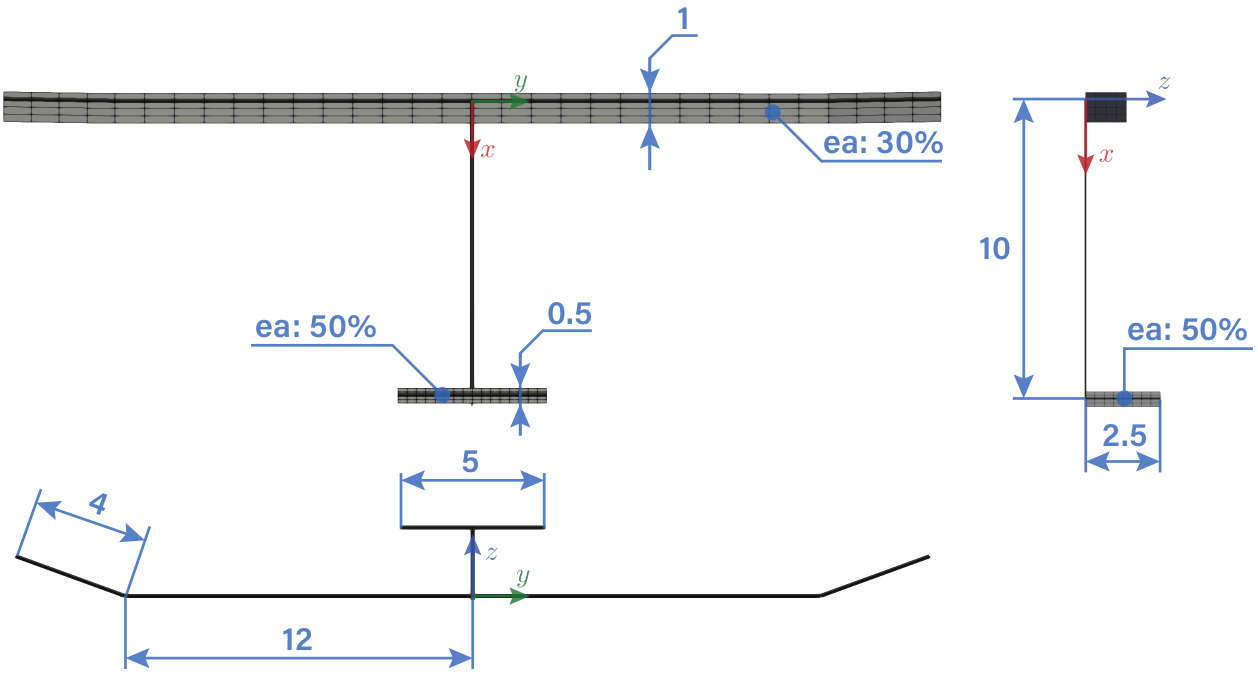
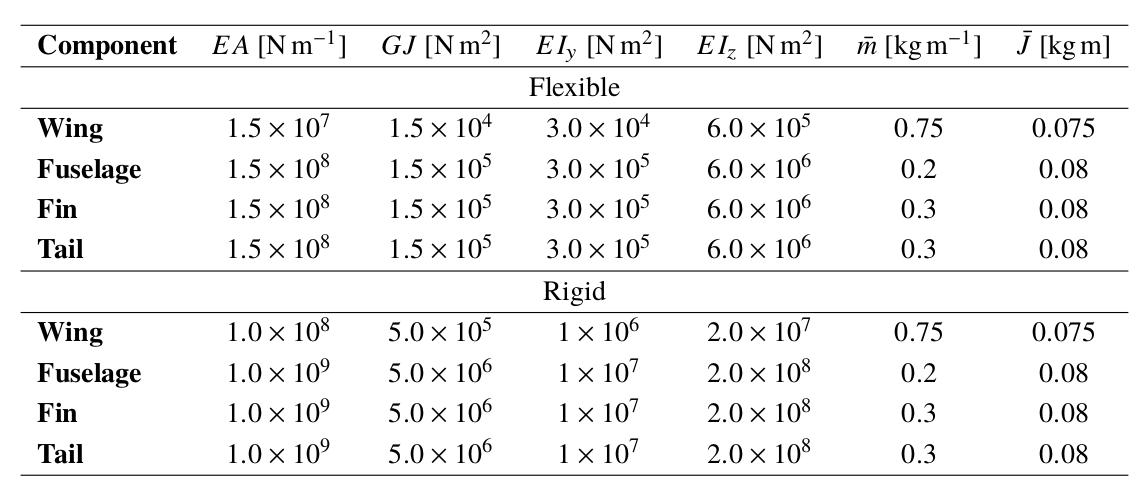
The HALE T-Tail model intends to be a representative example of a typical HALE configuration, with high flexibility and aspect-ratio.
A geometry outline and a summary of the beam properties are given next
[2]:
url = 'https://raw.githubusercontent.com/ImperialCollegeLondon/sharpy/dev_doc/docs/source/content/example_notebooks/images/t-tail_geometry.png'
Image(url=url, width=800)
[2]:
[3]:
url = 'https://raw.githubusercontent.com/ImperialCollegeLondon/sharpy/dev_doc/docs/source/content/example_notebooks/images/t-tail_properties.png'
Image(url=url, width=500)
[3]:
This case is included in tests/coupled/simple_HALE/. The generate_hale.py file in that folder is the one that, if executed, generates all the required SHARPy files. This document is a step by step guide to how to process that case.
The T-Tail HALE model is subject to a 20% 1-cos spanwise constant gust.
First, let’s start with importing SHARPy in our Python environment.
[4]:
import sharpy
import sharpy.sharpy_main as sharpy_main
And now the generate_HALE.py file needs to be executed.
[5]:
route_to_case = '../../../../cases/coupled/simple_HALE/'
%run '../../../../cases/coupled/simple_HALE/generate_hale.py'
There should be 3 new files, apart from the original generate_hale.py:
[6]:
!ls ../../../../cases/coupled/simple_HALE/
generate_hale.py simple_HALE.aero.h5 simple_HALE.fem.h5 simple_HALE.sharpy
SHARPy can be run now. In the terminal, doing cd to the simple_HALE folder, the command would look like:
sharpy simple_HALE.sharpy
From a python console with import sharpy already run, the command is:
[7]:
case_data = sharpy_main.main(['', route_to_case + 'simple_HALE.sharpy'])
/home/ad214/run/code_doc/sharpy/sharpy/aero/utils/uvlmlib.py:230: RuntimeWarning: invalid value encountered in true_divide
flightconditions.uinf_direction = np.ctypeslib.as_ctypes(ts_info.u_ext[0][:, 0, 0]/flightconditions.uinf)
/home/ad214/run/code_doc/sharpy/sharpy/aero/utils/uvlmlib.py:347: RuntimeWarning: invalid value encountered in true_divide
flightconditions.uinf_direction = np.ctypeslib.as_ctypes(ts_info.u_ext[0][:, 0, 0]/flightconditions.uinf)
The resulting data structure that is returned from the call to main contains all the time-dependant variables for both the structural and aerodynamic solvers.
timestep_info can be found in case_data.structure and case_data.aero. It is an array with custom-made structure to contain the data of each solver.
In the .sharpy file, we can see which solvers are run:
flow = ['BeamLoader',
'AerogridLoader',
'StaticTrim',
'BeamLoads',
'AerogridPlot',
'BeamPlot',
'DynamicCoupled',
]
In order:
- BeamLoader: reads the
fem.h5file and generates the structure for the beam solver. - AerogridLoader: reads the
aero.h5file and generates the aerodynamic grid for the aerodynamic solver. - StaticTrim: this solver performs a longitudinal trim (Thrust, Angle of attack and Elevator deflection) using the StaticCoupled solver.
- BeamLoads: calculates the internal beam loads for the static solution
- AerogridPlot: outputs the aerodynamic grid for the static solution.
- BeamPlot: outputs the structural discretisation for the static solution.
- DynamicCoupled: is the main driver of the dynamic simulation: executes the structural and aerodynamic solvers and couples both. Every converged time step is followed by a BeamLoads, AerogridPlot and BeamPlot execution.
Structural data organisation¶
The timestep_info structure contains several relevant variables:
for_pos: position of the body-attached frame of reference in inertial FoR.for_vel: velocity (in body FoR) of the body FoR wrt inertial FoR.pos: nodal position in A FoR.psi: nodal rotations (from the material B FoR to A FoR) in a Cartesian Rotation Vector parametrisation.applied_steady_forces: nodal forces from the aero solver and the applied forces.postproc_cell: is a dictionary that contains the variables generated by a postprocessor, such as the internal beam loads.
The structural timestep_info also contains some useful variables:
cagandcgareturn \(C^{AG}\) and \(C^{GA}\), the rotation matrices from the body-attached (A) FoR to the inertial (G).glob_posrotates theposvariable to give you the inertial nodal position. Ifinclude_rbm = Trueis passed,for_posis added to it.
Aerodynamic data organisation¶
The aerodynamic datastructure can be found in case_data.aero.timestep_info. It contains useful variables, such as:
dimensionsanddimensions_star: gives the dimensions of every surface and wake surface. Organised as:dimensions[i_surf, 0] = chordwise panels,dimensions[i_surf, 1] = spanwise panels.zetaandzeta_star: they are the \(G\) FoR coordinates of the surface vertices.gammaandgamma_star: vortex ring circulations.
Structural dynamics¶
We can now plot the rigid body dynamics:
RBM trajectory
[16]:
fig, ax = plt.subplots(1, 1, figsize=(7, 4))
# extract information
n_tsteps = len(case_data.structure.timestep_info)
xz = np.zeros((n_tsteps, 2))
for it in range(n_tsteps):
xz[it, 0] = -case_data.structure.timestep_info[it].for_pos[0] # the - is so that increasing time -> increasing x
xz[it, 1] = case_data.structure.timestep_info[it].for_pos[2]
ax.plot(xz[:, 0], xz[:, 1])
fig.suptitle('Longitudinal trajectory of the T-Tail model in a 20% 1-cos gust encounter')
ax.set_xlabel('X [m]')
ax.set_ylabel('Z [m]');
plt.show()

RBM velocities
[17]:
fig, ax = plt.subplots(3, 1, figsize=(7, 6), sharex=True)
ylabels = ['Vx [m/s]', 'Vy [m/s]', 'Vz [m/s]']
# extract information
n_tsteps = len(case_data.structure.timestep_info)
dt = case_data.settings['DynamicCoupled']['dt'].value
time_vec = np.linspace(0, n_tsteps*dt, n_tsteps)
for_vel = np.zeros((n_tsteps, 3))
for it in range(n_tsteps):
for_vel[it, 0:3] = case_data.structure.timestep_info[it].for_vel[0:3]
for idim in range(3):
ax[idim].plot(time_vec, for_vel[:, idim])
ax[idim].set_ylabel(ylabels[idim])
ax[2].set_xlabel('time [s]')
plt.subplots_adjust(hspace=0)
fig.suptitle('Linear RBM velocities. T-Tail model in a 20% 1-cos gust encounter');
# ax.set_xlabel('X [m]')
# ax.set_ylabel('Z [m]');
plt.show()

[18]:
fig, ax = plt.subplots(3, 1, figsize=(7, 6), sharex=True)
ylabels = ['Roll rate [deg/s]', 'Pitch rate [deg/s]', 'Yaw rate [deg/s]']
# extract information
n_tsteps = len(case_data.structure.timestep_info)
dt = case_data.settings['DynamicCoupled']['dt'].value
time_vec = np.linspace(0, n_tsteps*dt, n_tsteps)
for_vel = np.zeros((n_tsteps, 3))
for it in range(n_tsteps):
for_vel[it, 0:3] = case_data.structure.timestep_info[it].for_vel[3:6]*180/np.pi
for idim in range(3):
ax[idim].plot(time_vec, for_vel[:, idim])
ax[idim].set_ylabel(ylabels[idim])
ax[2].set_xlabel('time [s]')
plt.subplots_adjust(hspace=0)
fig.suptitle('Angular RBM velocities. T-Tail model in a 20% 1-cos gust encounter');
# ax.set_xlabel('X [m]')
# ax.set_ylabel('Z [m]');
plt.show()

Wing tip deformation
It is stored in timestep_info as pos. We need to find the correct node.
[19]:
fig, ax = plt.subplots(1, 1, figsize=(6, 6))
ax.scatter(case_data.structure.ini_info.pos[:, 0], case_data.structure.ini_info.pos[:, 1])
ax.axis('equal')
tip_node = np.argmax(case_data.structure.ini_info.pos[:, 1])
print('Wing tip node is the maximum Y one: ', tip_node)
ax.scatter(case_data.structure.ini_info.pos[tip_node, 0], case_data.structure.ini_info.pos[tip_node, 1], color='red')
plt.show()
Wing tip node is the maximum Y one: 16

We can plot now the pos[tip_node,:] variable:
[20]:
fig, ax = plt.subplots(1, 1, figsize=(7, 3))
# extract information
n_tsteps = len(case_data.structure.timestep_info)
xz = np.zeros((n_tsteps, 2))
for it in range(n_tsteps):
xz[it, 0] = case_data.structure.timestep_info[it].pos[tip_node, 0]
xz[it, 1] = case_data.structure.timestep_info[it].pos[tip_node, 2]
ax.plot(time_vec, xz[:, 1])
# fig.suptitle('Longitudinal trajectory of the T-Tail model in a 20% 1-cos gust encounter')
ax.set_xlabel('time [s]')
ax.set_ylabel('Vertical disp. [m]');
plt.show()

[21]:
fig, ax = plt.subplots(1, 1, figsize=(7, 3))
# extract information
n_tsteps = len(case_data.structure.timestep_info)
xz = np.zeros((n_tsteps, 2))
for it in range(n_tsteps):
xz[it, 0] = case_data.structure.timestep_info[it].pos[tip_node, 0]
xz[it, 1] = case_data.structure.timestep_info[it].pos[tip_node, 2]
ax.plot(time_vec, xz[:, 0])
# fig.suptitle('Longitudinal trajectory of the T-Tail model in a 20% 1-cos gust encounter')
ax.set_xlabel('time [s]')
ax.set_ylabel('Horizontal disp. [m]\nPositive is aft');
plt.show()

Wing root loads
The wing root loads can be extracted from the postproc_cell structure in timestep_info.
[22]:
fig, ax = plt.subplots(3, 1, figsize=(7, 6), sharex=True)
ylabels = ['Torsion [Nm2]', 'OOP [Nm2]', 'IP [Nm2]']
# extract information
n_tsteps = len(case_data.structure.timestep_info)
dt = case_data.settings['DynamicCoupled']['dt'].value
time_vec = np.linspace(0, n_tsteps*dt, n_tsteps)
loads = np.zeros((n_tsteps, 3))
for it in range(n_tsteps):
loads[it, 0:3] = case_data.structure.timestep_info[it].postproc_cell['loads'][0, 3:6]
for idim in range(3):
ax[idim].plot(time_vec, loads[:, idim])
ax[idim].set_ylabel(ylabels[idim])
ax[2].set_xlabel('time [s]')
plt.subplots_adjust(hspace=0)
fig.suptitle('Wing root loads. T-Tail model in a 20% 1-cos gust encounter');
# ax.set_xlabel('X [m]')
# ax.set_ylabel('Z [m]');
plt.show()

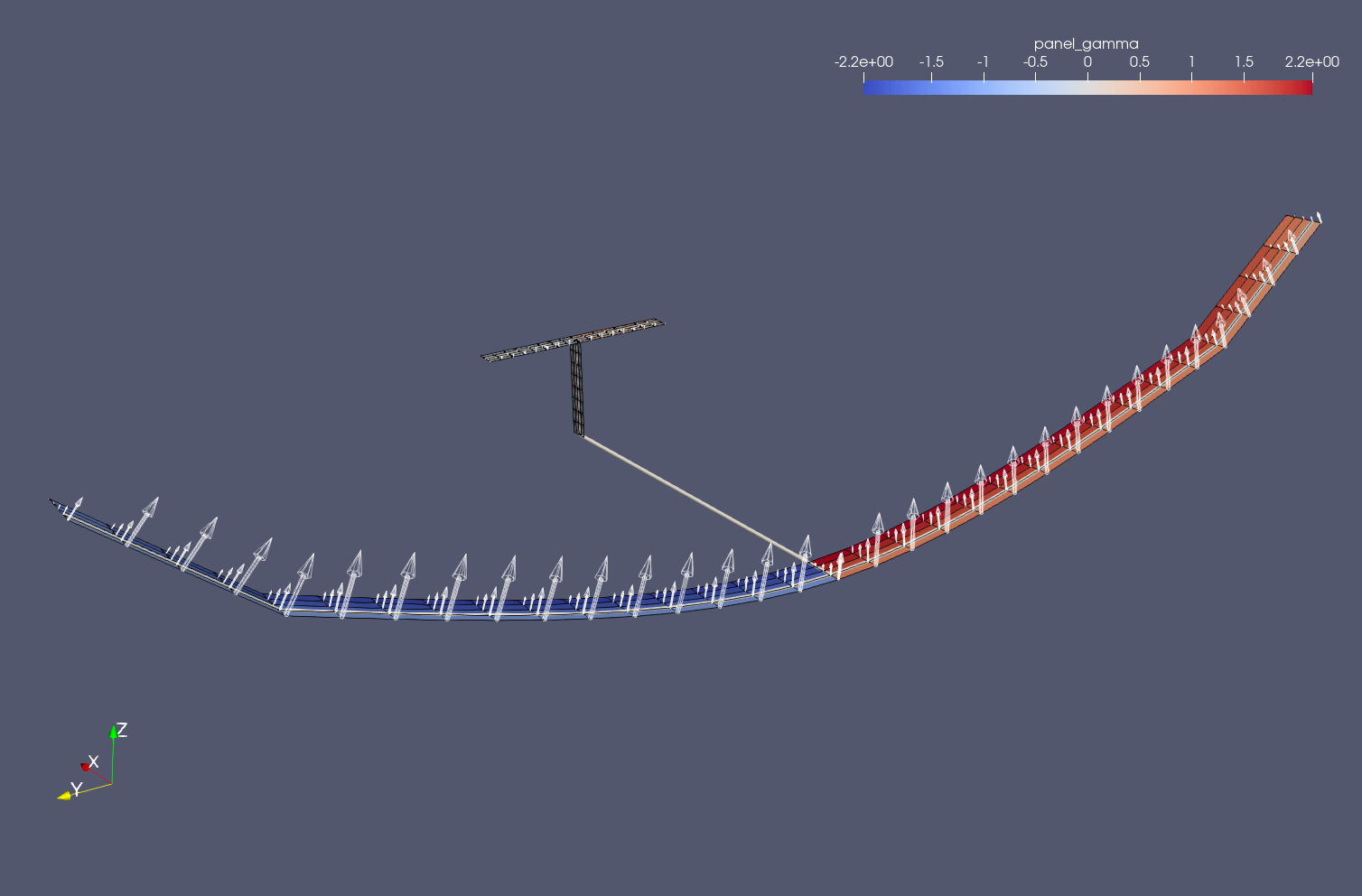
Aerodynamic analysis¶
The aerodynamic analysis can be obviously conducted using python. However, the easiest way is to run the case by yourself and open the files in output/simple_HALE/beam and output/simple_HALE/aero with Paraview.
[23]:
url = 'https://raw.githubusercontent.com/ImperialCollegeLondon/sharpy/dev_doc/docs/source/content/example_notebooks/images/t-tail_solution.png'
Image(url=url, width=600)
[23]: